Вы здесь
Робот разработчиков из Пермского Политеха поможет «прокачать» навыки будущим машиностроителям
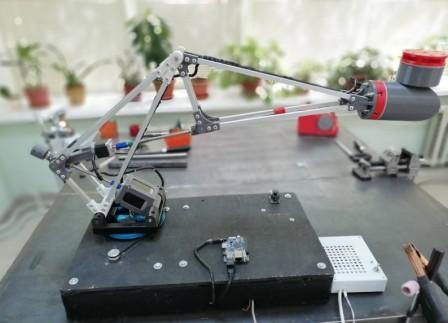 В последнее воскресенье сентября в России и некоторых других странах СНГ отмечается день машиностроителя. Молодые исследователи из Пермского Политеха разработали робота, который поможет будущим специалистам в этой области лучше освоить работу с современным оборудованием. Его преимущество, по сравнению с аналогами, – в невысокой стоимости и доступности для учебных заведений.
В последнее воскресенье сентября в России и некоторых других странах СНГ отмечается день машиностроителя. Молодые исследователи из Пермского Политеха разработали робота, который поможет будущим специалистам в этой области лучше освоить работу с современным оборудованием. Его преимущество, по сравнению с аналогами, – в невысокой стоимости и доступности для учебных заведений.
– Будущие машиностроители не всегда имеют возможность обучаться управлению промышленными манипуляторами. Во время практики на предприятиях обучающиеся работают с дорогостоящим оборудованием и не имеют доступа к его программному обеспечению. Стоимость ремонта и обслуживания таких роботов также высока, и для выполнения более «творческих» задач оно не всегда подходит. Более дешевые аналоги не отличаются высоким качеством и быстро ломаются. Поэтому нашей целью стало создание качественного и универсального робота-манипулятора, – рассказывает автор разработки, студент электротехнического факультета Пермского Политеха Алексей Духанин.
 «Тренировочный» робот позволит студентам приобрести опыт, который пригодится в дальнейшей работе на предприятии. Кроме учебных заведений, продукт можно будет применять для обучения в малых лабораториях и кружках робототехники. Среди заданий, которые студенты и школьники смогут выполнять с помощью разработки, – изучение алгоритмов искусственного интеллекта, создание веб-интерфейсов, программирование и решение задач обратной кинематики.
«Тренировочный» робот позволит студентам приобрести опыт, который пригодится в дальнейшей работе на предприятии. Кроме учебных заведений, продукт можно будет применять для обучения в малых лабораториях и кружках робототехники. Среди заданий, которые студенты и школьники смогут выполнять с помощью разработки, – изучение алгоритмов искусственного интеллекта, создание веб-интерфейсов, программирование и решение задач обратной кинематики.
– Продукт уже можно внедрять в образовательный процесс. Срок изготовления одного робота составляет 1-2 недели. Его можно реализовать в виде настольного оборудования, оснастить передвижной подставкой или самодвижущейся платформой. Это позволит расширить сферу изучения образовательных программ, – поясняет научный руководитель разработчика, доцент кафедры информационных технологий и автоматизированных систем электротехнического факультета Пермского Политеха, кандидат технических наук Даниил Курушин.
Предыдущую модель манипулятора молодые исследователи представили на конкурсе «Оптимальный захват» «Кванториады 2019» (г. Москва) совместно с пермским технопарком «Кванториум Фотоника» и стали лауреатами.
Наши партнёры