Вы здесь
Датчик ученых Пермского Политеха повысит чувствительность роботов и бионических протезов с помощью «вибрисс»
В сфере робототехники и измерительной техники постоянно совершенствуют сенсорные покрытия, чтобы повысить их чувствительность. Они позволяют отслеживать температуру, внешние воздействия и удары, а также определять форму и размер контактирующих с ними тел. Ученые Пермского Политеха разработали электромеханическую модель тактильного полимерного покрытия со встроенным оптоволоконным датчиком. На его поверхности расположен слой специальных ворсинок – «вибрисс», которые позволяют «ощущать» окружающие предметы. Разработку можно использовать при создании отечественных человекоподобных роботов, бионических протезов и искусственных органов.
Исследование выполнено в рамках Программы стратегического академического лидерства «Приоритет 2030».
Результаты работы ученые опубликовали в «Журнале радиоэлектроники» (2022). Разработка реализована при финансовой поддержке РФФИ и Пермского края.
– Тактильное покрытие может принимать различные формы и представляет собой гибкий тонкий полимерный слой со встроенной сетью оптоволоконных датчиков. Они преобразуют информацию о прикосновениях в оптические сигналы, чтобы передать их по оптоволокну «искусственному интеллекту». В перспективе покрытие можно будет применять в качестве искусственной кожи человекоподобных роботов, в бионических протезах и искусственных органах. Технология позволит сделать реальными их тактильные ощущения. Определив свойства предмета, робот сможет точно рассчитать необходимое и достаточное усилие для его удержания и последующих действий, – поясняет руководитель проекта, профессор кафедры механики композиционных материалов и конструкций Пермского Политеха, доктор физико-математических наук Андрей Паньков.
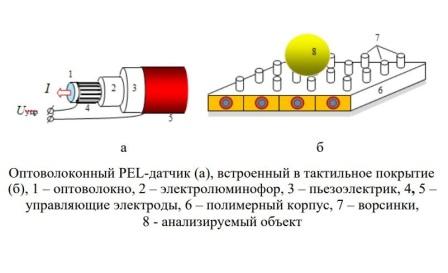
По словам разработчиков, тактильное полимерное покрытие основано на использовании «механолюминесцентного эффекта» – светоотдачи при механическом воздействии на систему из пьезоэлектрических и электролюминесцентных элементов. При контакте с анализируемыми объектами ворсинки деформируются и осуществляют информативные механические воздействия на соответствующие участки корпуса и встроенного в него оптоволоконного механолюминесцентного датчика. На активированных участках датчика происходит светоотдача внутрь оптоволокна. Это позволяет передавать информативные световые сигналы на большие расстояния для их последующей «расшифровки». Такой способ передачи имеет преимущества по сравнению с аналогами, в которых деформирование ворсинок «считывается» системой высокоскоростной фотовидеорегистрации.
Ученые Пермского Политеха исследовали деформационные и электрические поля, которые образуются при этом процессе в элементах тактильного покрытия: ворсинках, корпусе и встроенном в него оптоволоконном механолюминесцентном датчике. Электромеханическая модель позволила выявить зависимости информативных световых сигналов от тактильных «ощущений» покрытия при контакте ворсинок с предметами.
Разработка исследователей сможет повысить чувствительность измерительных приборов с сенсорными покрытиями и стать «второй» кожей для человекоподобных роботов, бионических протезов и искусственных органов. Технология сделает реальными их тактильные ощущения при восприятии внешнего мира.
Наши партнёры